ばらせないオムニホイールについて呟いたところ、興味のあるかたが複数おられるようだったので、作り方をまとめてみた。
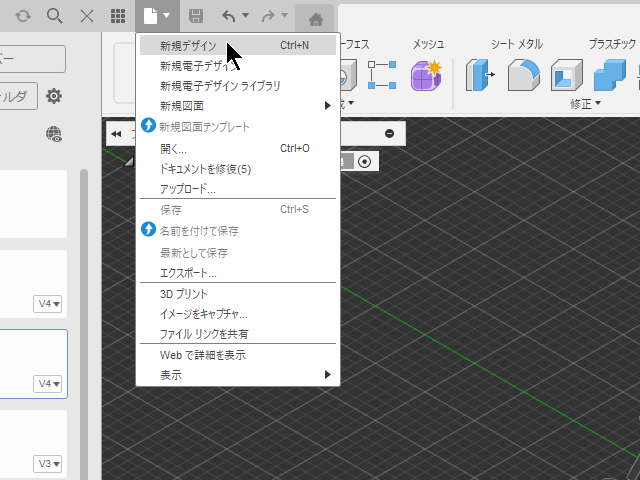
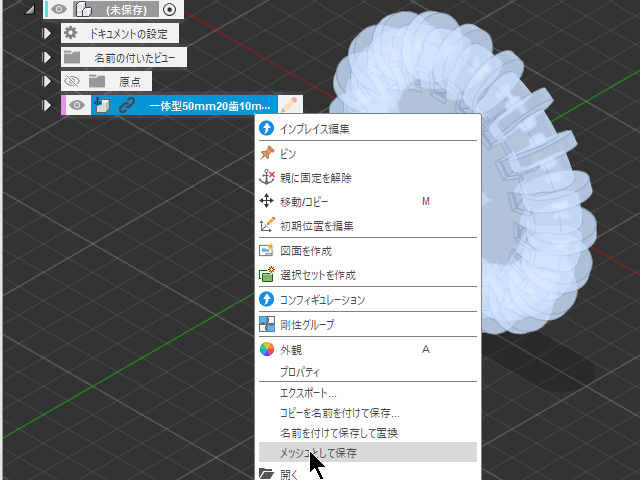
使用したツール類
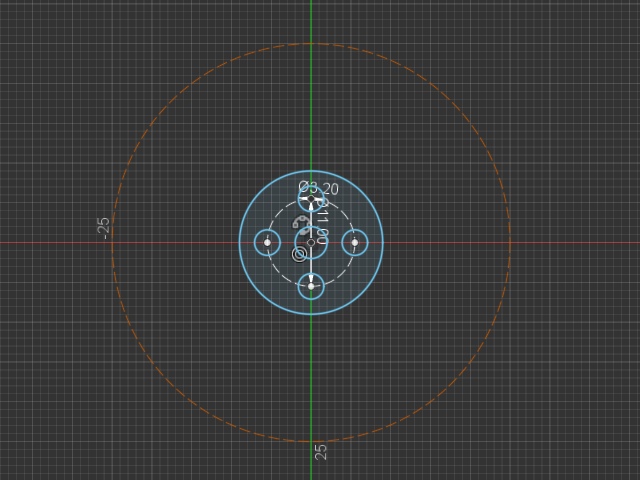
スケッチ1
オムニホイール全体の大きさを決める用のスケッチ作成。オムニホイール直径は切りよく50mmとする。
ついでにホイール固定用の取り付け穴の位置なども入れておき、サブホイールの配置に邪魔にならないかの判断ができるようにしておく。
スケッチ2
作業をしやすくするため、スケッチは適当に分割する。
サブホイールの数、サイズを決める用のスケッチ作成。
とりあえずサブホイールは切りよく直径10mm、厚み2mmとし、サブホイールは20個で進める。
サブホイールの軸中心に外接ポリゴンを配置。オムニホイール半径が25mm、サブホイール半径が5mmになるから外接ポリゴン半径?は20mm。

サブホイール1つ分の設計をし、それをパターン配置で結合して全体を作るようにするために、中心とポリゴンの頂点を結ぶ三角を作る。

メインホイールを直径46mmとすると、サブホイールが2mm飛び出す。
先の三角の辺をメインホイール外周まで延長。
サブホイールを支えるシャフト部分の直径を切りよく2mmとしてみる。シャフト部分の長さは隣と当たらないよう、また隣と仕切れるような長さにしておく。3Dプリンタのノズル径より細かい造形はできないものとしてサイズを決める。

サブホイールとサブホイールが収まる空間は外接ポリゴンの辺を軸に「回転」で作る。
サブホイールのホイール部とシャフト部を適当にトリムで整理し、オフセットでサブホイールが収まる空間も作成。
とりあえずオフセット量は0.3mmとした。オフセット量は召喚して動きを見ながら調整する。

サブホイールが収まる空間部分を適当に調整。
サブホイールの外周部分がメインホイールに接触するとサブホイールの回転がスムーズにならないので、当たらないよう空間を拡張しておく。


適当に面取り。
回転でボディを作る場合、軸から片側分(今回は左側)があればよいので、反対側の調整は省略。

スケッチ3
スケッチを作成する面を変えて、メインホイール作成用にスケッチ追加。
メインホイールとサブホイールが印刷時の底面に接するような形状にする。
セットカラーを使ってモーターに固定する場合、干渉しないことを確認する。
点線が直径10mmのサブホイール

先のスケッチの位置関係。

メインホイール
スケッチは終了して、回転でメインホイール作成。
作成後ボディは一旦非表示にしておく。

メインホイールにサブホイールが収まる空間を作る。
スケッチ2を表示し、サブホイールと隙間部分を選択し、回転でコマ状のボディを作成。

円状パターンでサブホイール個数分複製。

メインホイールのボディを表示し、結合で(1)ターゲットボディにメインホイール、(2)ツールボディに先のコマ状ボディ、(3)操作に切り取りを選択。

セットカラーに固定するための穴を開けてメインホイール完成。

サブホイール
回転でサブホイールの1つを作成。

円状パターンで複製。

仕上げ
適当に面取りしてとりあえず印刷用データは完成とする。


(続く)