オムニホイールの設計
以前、なるべく安価に作成した下の写真のオムニホイールを改めて設計した。
当時は盛ったり削ったり苦労した覚えがあるが、比較的容易に作成できたので流れをまとめる。

とりあえずの仕様はこちら。
- Fusion 360で設計。3Dプリンタで出力する。
- ダイセン枝豆オムニと同じ直径46mmとし、置き換えを容易にする。
- メインホイールは3Dプリンタで一体成型。
- サブホイールのシャフトにはクリップを利用する。
- 入手先:100円ショップ
- シャフトは一応はめ込み式を考慮するが、安価なのでハンダゴテでメインホイールに固定し使い捨て前提とする。
- サブホイールのグリップ材に外径8mm内径5mmの燃料ホースを利用する。
- 入手先:ホームセンター園芸コーナーなど、10cm10円程度
3Dデータの最終形はこんな感じ。
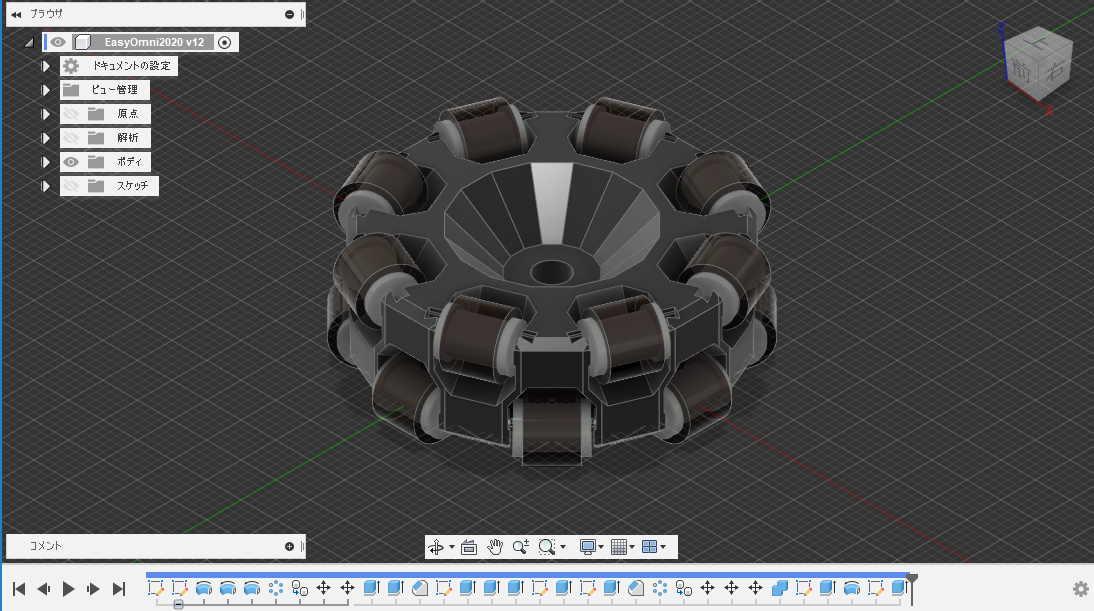
サイドホイールは直径8mm、長さ8mm、グリップ材は長さ6mm、シャフトは12mmとして、それらが収まるように寸法を決めた。
サイドホイールの配置は1列8個の内側・外側の2列構成の合計16個。内側と外側のシャフト間隔は10mm。

続きは後ほど。
基板ホルダーの設計
「Thingiverse - Digital Designs for Physical Objects」で「PCB Holder」を検索した際に、自分でも簡単に作れそうな設計かつパーツのものがあり真似してみた。
材料は最寄りのダイソーでも購入可能な「ダイソーの超強力マグネット」を使う。
(1)全体の大きさをスケッチして押し出し。底に磁石が入る穴を設ける。
ロボ教室で小学生も使うことを考慮し、なるべく小型化してみた。このスケッチは30x30mm。押し出し量は磁石径に合わせて13mm。


(2)底となる面にスケッチ作成。磁石の抜け止めを作り、合成で押し出し。斜めの線は、8角形の外径ポリゴンで作成。


(3)上面に、基板を縦に支える溝と角で支える窪みのスケッチを作成して、切り取りで押し出し。



(4)角で支える際の返し用のスケッチを窪みの2面で作成して、合成で押し出し。




(5)出力したものの角は丸くなりがちなので、基板の角が収まる溝のスケッチを作成して切り取りで押し出し。

(6)上面サイドに設けた斜めの面に、基板を45度で支えるための溝用のスケッチを作成して、切り取りで押し出し。


(7)上面に基板を辺で支える溝用のスケッチを作成して、切り取りで押し出し。(8)の飛び出し部分もまとめて切り取る。


(8)適当に面取り、フィレットをつけてデータ完成。


ロボ教室でのリリース初日に半田ごてで何個かつぶされてしまったのは想定外だが、作業はしやすくなった(と思う)。
縦と斜めの溝を省略して、もっと低い背で作ってもよいかもしれない。


メカナムホイールの設計
Robomasterを見てメカナムホイールを使いたくなり設計してみた。
projectrm.niwakasoft.jp
とりあえず第一弾は、このような感じで完成した。
自作メカナム。
— 熊工房 ohguma (@ohguma) 2019年8月17日
サブホイールは径の異なるホースを組み合わせて楕円にするつもりだったが、細いホースだけでなんとかなりそう。 pic.twitter.com/UNDbvGMCWY
設計にあたり、以下に気をつけた。
- なるべく、手持ちの3Dプリンタ(ANYCUBIC MEGA-S)と、近所のホームセンターで購入できるもので組む。
- サブホイールのグリップ素材として、燃料ホース(10cmが20円程度)を利用する。近所では、内径x外形で 6x3・7x4・8x5・9x6・11x7・ 12x8・ 13x9・16x12といろいろ揃う。
- サブホイールのシャフトとして、ステンレス棒(1mが数百円)を利用する。
復習も兼ねて、サブホイール部分の作り方をまとめておく。
メカナムホイールの設計方法 by ohguma
(1)まずホイール径を決める。

(2)ホイール厚を決める。両端にオフセット平面を準備しておく。

(3)サブホイール用の傾斜平面を準備する。原点の軸でなく、(1)のホイール径のスケッチの直径部分の直線を軸とすれば、作成した傾斜平面ともとの平面の原点が揃い、作業しやすくかった。角度は45度。

(4)サブホイール径は、使用するグリップ素材に依存する。今回は外形x内径が9x6mmの燃料ホースを採用。サブホイールはホイール外形に合わせてラグビーボール状に径が変化するが、異なる径のホース(外形8mmと9mm)を使いそれを再現する(つもりだったが、ある程度伸びるので1種類のホースで実装した)。

(5)ホイール径を越さないい程度に、押し出し量を目視で調整。

(6)サブホイールの軸はホームセンターにある2mmのステンレス棒を使用。切断にはニッパーでなく、クリッパーを使用。

(7)サブホイールの端を基準にオフセット平面作成。

(8)サブホイールの支えを押し出し。

(9)サブホイールと支えを、円状配置でコピー。

(10)履歴を戻り、支え部分の形状を変え、各サブホイールごとの支えが重なり、結合できるようする。

(11)支えのみを結合し、(2)のオフセット平面を使って、はみ出す部分を切り取り。

(12)サブホイールを非表示にして、支えを結合

(13)適当に面取り。印刷時に下側になる面は、面取りして天井を作らないようにする。斜めのオーバーハングする壁ならサポートなしで印刷できる。

(14)適当に軸受等を作成。

(15)コピーして、メインホイールの裏表を揃える

(16)サブホイールを表示して全体を確認。

反省
サブホイールのシャフトをサンドイッチして支えるようにしたが、ホイールの組み立てがとても面倒だった。
メインホイールの外側から長いネジを通して、反対側をナット等で固定する方式を推す。
micro:bitでサーモグラフィーを作ってみた(さらに更新)
見栄えのする表示デモは未だ思いつかないが、電源投入時にぼんやり明るくなるようにしてみた。
makecode.microbit.org電源投入時に段々と明るくなるようにしてみた。動画だと分かりにくい。
— 熊工房 ohguma (@ohguma) July 6, 2019
一番下の行は、上とは購入時期が年単位で違うからか、同じ輝度指定でも明るさが違う。プログラムのミスはないはず。 pic.twitter.com/kGwDgZjCHu
micro:bitでサーモグラフィーを作ってみた(更新)
温度の表現方法を思いつき、プログラムを更新した。
ohguma.hatenablog.com
これまでは、
- 20~30度を青~赤で(色相の変化 240~0、彩度99、輝度10)
表現していたが、以下を追加し、表現の幅が広がった。
- 30度超~30度を赤~白で(彩度の変化 99~0、輝度10)
- 20度未満~10度を青~黒で(輝度の変化 10~0、彩度99)
micro:bitサーモグラフィーを更新。
— 熊工房 ohguma (@ohguma) June 30, 2019
20〜30度は色相を変化させ青〜赤としていたが、〜35度は彩度の変化で赤から白へ、20度未満は輝度の変化で青から黒を追加。
表現の幅が広がると同時に蛍光灯のリビング照明が熱いことを知った。 pic.twitter.com/35kcSYpL5i
あとは、電源投入時に見栄えのする表示デモを時間ができたら作る予定にしておく。